Cheaper by the Dozen: Group Annotation of 3D Data
UIST, October 2014
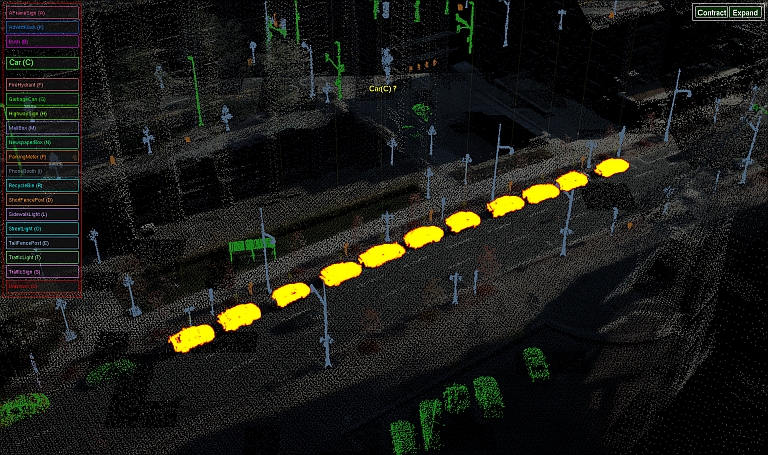
IGRA group annotation interface
Abstract
This paper proposes a group annotation approach to interactive
semantic labeling of data, and it demonstrates the idea in a system
for labeling objects in 3D LiDAR scans of a city. In this approach,
the system selects a group of objects, predicts
a semantic label for it, and highlights it in an interactive display.
In response, the user either confirms the predicted label, provides a
different label, or indicates that no single label can be assigned to
all objects in the group. This sequence of interactions repeats
itself until a label has been confirmed or provided for every object
in the data set. The main advantage of this approach is that it
provides faster interactive labeling rates than alternative
approaches, especially in cases where all labels must be explicitly
confirmed by a person. The main challenge is to provide an algorithm
that selects groups with many objects all of the same label type
arranged in patterns that are quick to recognize, which requires a
classifier for prediction of new object labels and a model for human
recognition of objects in groups. We address these challenges by
defining an objective function that models the estimated time required
to process all unlabeled objects and approximation algorithms to
minimize it. Results of user studies suggest that group annotation
can be used to label objects in LiDAR scans of cities significantly
faster than one-by-one annotation with active learning.
PhD thesis
- PDF [12 MB]
- Video (full) [58 MB]
- Video (full) on youtube
- Video (short) [13 MB]
- Video (short) on youtbe
- Code [1.6 MB]
- Data [216 MB]
- Paper PDF file
- Presentation PPT file
Citation
Aleksey Boyko and Thomas Funkhouser.
"Cheaper by the Dozen: Group Annotation of 3D Data."
UIST, October 2014.
BibTeX
@inproceedings{Boyko:2014:CBT,
author = "Aleksey Boyko and Thomas Funkhouser",
title = "Cheaper by the Dozen: Group Annotation of {3D} Data",
booktitle = "UIST",
year = "2014",
month = oct
}