Pose-independent Simplification of Articulated Meshes
Symposium on Interactive 3D Graphics, April 2005
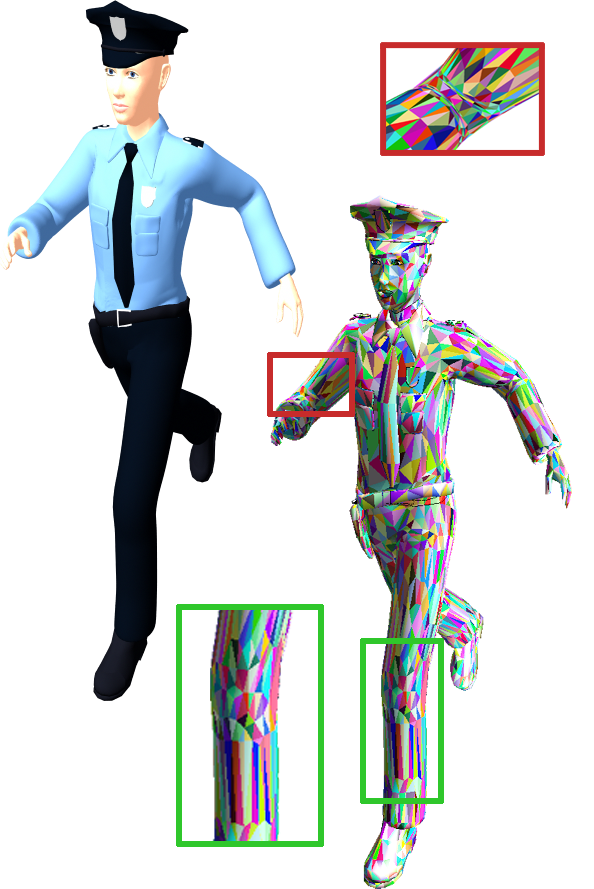 |
A full resolution model of a police officer is shown on the left,
with its simplified counterpart on the right. Faces are randomly colored,
in order to clearly show the triangulation. Note that the simplified model
maintains high detail around joints, such as the elbows, while detail in the
rest of the model is reduced.
(Click for full-resolution picture) |
Abstract
Methods for triangle mesh decimation are common; however, most existing
techniques operate only on static geometry. In this paper, we present a
view- and pose-independent method for the automatic simplification of skeletally
articulated meshes. Such meshes have associated kinematic skeletons that
are used to control their deformation, with the position of each vertex
influenced by a linear combination of bone transformations. Our method
extends the commonly-used quadric error metric by incorporating
knowledge of potential poses into a probability function. We minimize
the average error of the deforming mesh over all possible configurations,
weighted by the probability. This is possible by transforming the
quadrics from each configuration into a common coordinate system. Our
simplification algorithm runs as a preprocess, and the resulting meshes
can be seamlessly integrated into existing systems. We demonstrate the
effectiveness of this approach for generating highly-simplified models
while preserving necessary detail in deforming regions near joints.
Paper
Video
Talk
- I3D 2005 talk as PPT
Acknowledgements
- Sponsored in part by software donation from Alias .
Citation
Christopher DeCoro and Szymon Rusinkiewicz.
"Pose-independent Simplification of Articulated Meshes."
Symposium on Interactive 3D Graphics, April 2005.
BibTeX
@inproceedings{DeCoro:2005:PSO,
author = "Christopher DeCoro and Szymon Rusinkiewicz",
title = "Pose-independent Simplification of Articulated Meshes",
booktitle = "Symposium on Interactive 3D Graphics",
year = "2005",
month = apr
}