Symmetry Descriptors and 3D Shape Matching
Symposium on Geometry Processing, July 2004
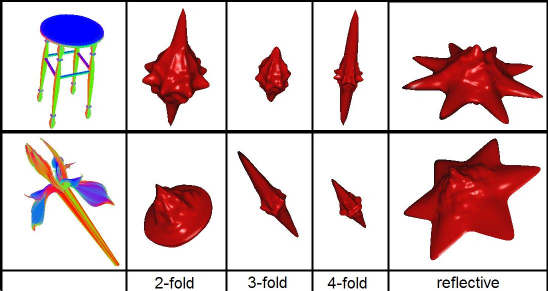
A visualization of the symmetry descriptors for a stool and an iris.
The visualization is obtained by scaling unit vectors on the sphere in
proportion to the measure of rotational symmetry about the axis through
the center of mass, in the direction of the vector, and the measure of
reflective symmetry about the plane through the center of mass, normal
to the vector.
Abstract
In this paper, we present the Symmetry Descriptors of a 3D model. This is a collection of spherical functions that describes the measure of a model s rotational and reflective symmetry with respect to every axis passing through the center of mass. We show that Symmetry Descriptors can be computed efficiently using fast signal processing techniques, and demonstrate the empirical value of Symmetry Descriptors by showing that they improve matching performance in a variety of shape retrieval experiments.
Paper
Citation
Michael Kazhdan, Thomas Funkhouser, and Szymon Rusinkiewicz.
"Symmetry Descriptors and 3D Shape Matching."
Symposium on Geometry Processing, July 2004.
BibTeX
@inproceedings{Kazhdan:2004:SDA,
author = "Michael Kazhdan and Thomas Funkhouser and Szymon Rusinkiewicz",
title = "Symmetry Descriptors and {3D} Shape Matching",
booktitle = "Symposium on Geometry Processing",
year = "2004",
month = jul
}