TidyBot: Personalized Robot Assistance with Large Language Models
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), October 2023
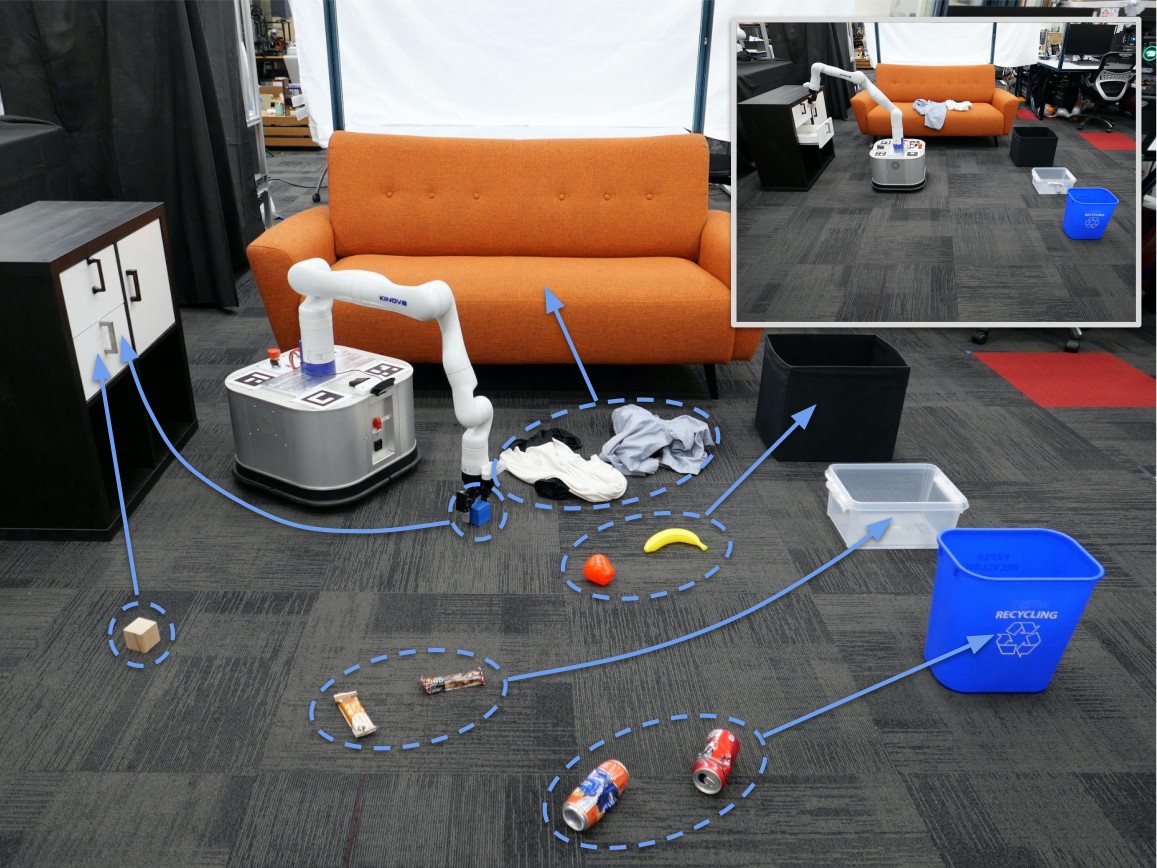
We study the task of household cleanup, where each object on the
floor must be picked up and put away while following user preferences.
Abstract
For a robot to personalize physical assistance
effectively, it must learn user preferences that can be generally
reapplied to future scenarios. In this work, we investigate
personalization of household cleanup with robots that can tidy
up rooms by picking up objects and putting them away. A key
challenge is determining the proper place to put each object,
as people’s preferences can vary greatly depending on personal
taste or cultural background. For instance, one person may
prefer storing shirts in the drawer, while another may prefer
them on the shelf. We aim to build systems that can learn
such preferences from just a handful of examples via prior
interactions with a particular person. We show that robots
can combine language-based planning and perception with the
few-shot summarization capabilities of large language models
(LLMs) to infer generalized user preferences that are broadly
applicable to future interactions. This approach enables fast
adaptation and achieves 91.2% accuracy on unseen objects in
our benchmark dataset. We also demonstrate our approach
on a real-world mobile manipulator called TidyBot, which
successfully puts away 85.0% of objects in real-world test
scenarios.
Paper
Video
- Results video on Youtube
Links
Citation
Jimmy Wu, Rika Antonova, Adam Kan, Marion Lepert, Andy Zeng, Shuran Song, Jeannette Bohg, Szymon Rusinkiewicz, and Thomas Funkhouser.
"TidyBot: Personalized Robot Assistance with Large Language Models."
Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), October 2023.
BibTeX
@inproceedings{Wu:2023:TPR,
author = "Jimmy Wu and Rika Antonova and Adam Kan and Marion Lepert and Andy Zeng
and Shuran Song and Jeannette Bohg and Szymon Rusinkiewicz and
Thomas Funkhouser",
title = "{TidyBot}: Personalized Robot Assistance with Large Language Models",
booktitle = "Proc. IEEE/RSJ International Conference on Intelligent Robots and
Systems (IROS)",
year = "2023",
month = oct
}