TidyBot++: An Open-Source Holonomic Mobile Manipulator for Robot Learning
Conference on Robot Learning (CoRL), November 2024
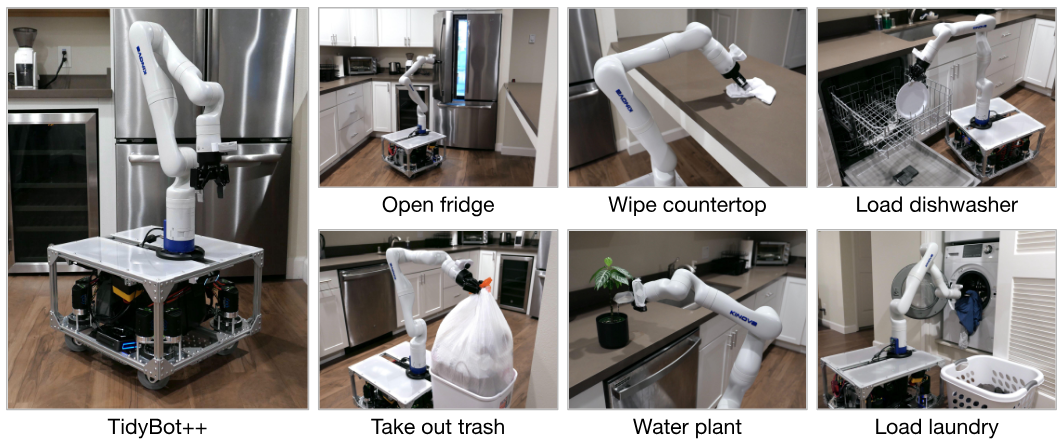
We develop an open-source mobile manipulator with a holonomic base (left), and show
that it can perform a variety of household tasks in a real apartment home (right).
Abstract
Exploiting the promise of recent advances in imitation learning for mobile manipulation will require the collection of large numbers of human-guided demonstrations. This paper proposes an open-source design for an inexpensive, robust, and flexible mobile manipulator that can support arbitrary arms, enabling a wide range of real-world household mobile manipulation tasks. Crucially, our design uses powered casters to enable the mobile base to be fully holonomic, able to control all planar degrees of freedom independently and simultaneously. This feature makes the base more maneuverable and simplifies many mobile manipulation tasks, eliminating the kinematic constraints that create complex and time-consuming motions in nonholonomic bases. We equip our robot with an intuitive mobile phone teleoperation interface to enable easy data acquisition for imitation learning. In our experiments, we use this interface to collect data and show that the resulting learned policies can successfully perform a variety of common household mobile manipulation tasks.
Paper
Video
- On Youtube
Links
Citation
Jimmy Wu, William Chong, Robert Holmberg, Aaditya Prasad, Yihuai Gao, Oussama Khatib, Shuran Song, Szymon Rusinkiewicz, and Jeannette Bohg.
"TidyBot++: An Open-Source Holonomic Mobile Manipulator for Robot Learning."
Conference on Robot Learning (CoRL), November 2024.
BibTeX
@inproceedings{Wu:2024:TAO,
author = "Jimmy Wu and William Chong and Robert Holmberg and Aaditya Prasad and
Yihuai Gao and Oussama Khatib and Shuran Song and Szymon
Rusinkiewicz and Jeannette Bohg",
title = "{TidyBot++}: An Open-Source Holonomic Mobile Manipulator for Robot
Learning",
booktitle = "Conference on Robot Learning (CoRL)",
year = "2024",
month = nov
}