High-Precision Localization Using Ground Texture
IEEE International Conference on Robotics and Automation (ICRA), May 2019
Abstract
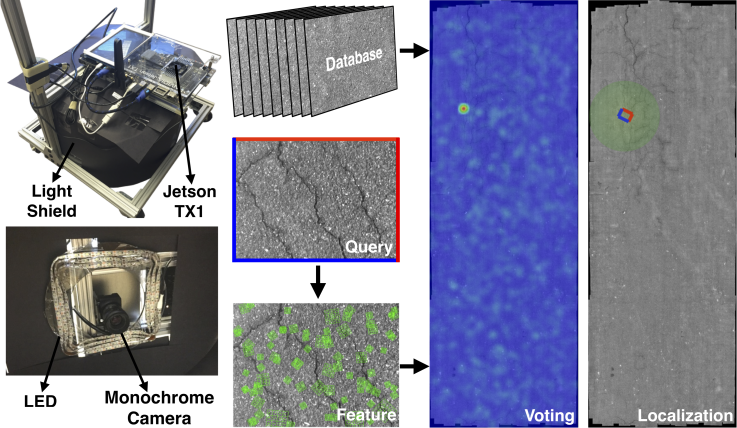
Location-aware applications play an increasingly critical role in everyday life. However, satellite-based localization (e.g., GPS) has limited accuracy and can be unusable in dense urban areas and indoors. We introduce an image-based global localization system that is accurate to a few millimeters and performs reliable localization both indoors and outside. The key idea is to capture and index distinctive local keypoints in ground textures. This is based on the observation that ground textures including wood, carpet, tile, concrete, and asphalt may look random and homogeneous, but all contain cracks, scratches, or unique arrangements of fibers. These imperfections are persistent, and can serve as local features. Our system incorporates a downward-facing camera to capture the fine texture of the ground, together with an image processing pipeline that locates the captured texture patch in a compact database constructed offline. We demonstrate the capability of our system to robustly, accurately, and quickly locate test images on various types of outdoor and indoor ground surfaces.
Paper
Webpage
Citation
Linguang Zhang, Adam Finkelstein, and Szymon Rusinkiewicz.
"High-Precision Localization Using Ground Texture."
IEEE International Conference on Robotics and Automation (ICRA), May 2019.
BibTeX
@inproceedings{Zhang:2019:HLU,
author = "Linguang Zhang and Adam Finkelstein and Szymon Rusinkiewicz",
title = "High-Precision Localization Using Ground Texture",
booktitle = "IEEE International Conference on Robotics and Automation (ICRA)",
year = "2019",
month = may
}