Automated View and Path Planning for Scalable Multi-Object 3D Scanning
ACM Transactions on Graphics (Proc. SIGGRAPH Asia), November 2016
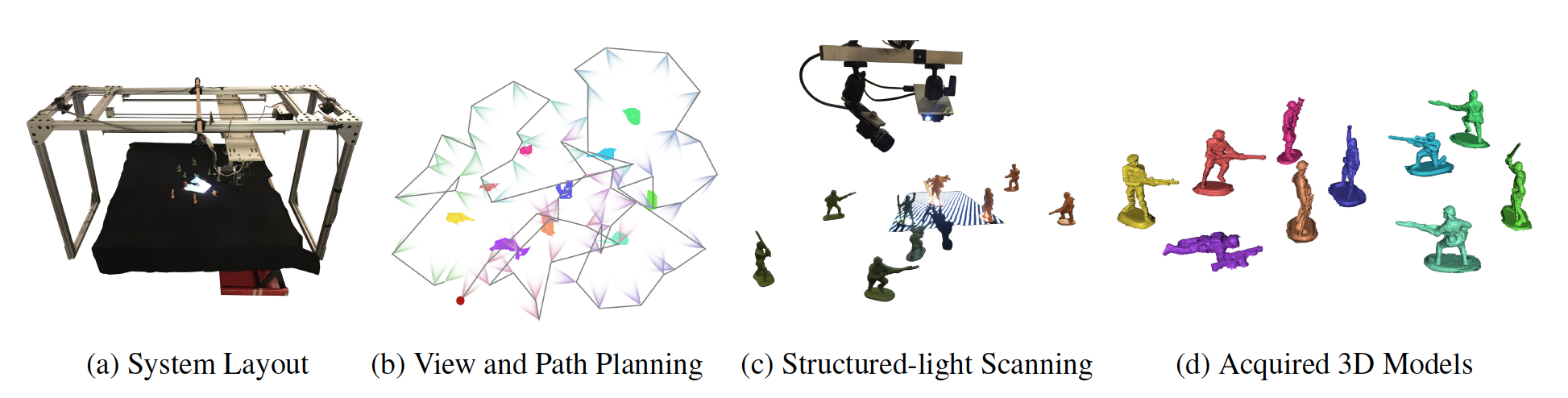
Our scanning system (a) automatically performs 3D scanning of multiple objects. Based on a silhouette-carved rough model, it plans views and a path to automatically scan all objects (b), positioning a structured-light 3D scanner to capture the necessary views (c). We are able to capture dozens of objects at once (d).
Abstract
Demand for high-volume 3D scanning of real objects is rapidly growing in a wide range of applications, including online retailing, quality-control for manufacturing, stop motion capturing for 3D animation, as well as archaeological documentation and reconstruction. Although mature technologies exist for high-fidelity 3D model acquisition, deploying them at scale continues to require non-trivial manual labor. We describe a system that allows non-expert users to scan large numbers of physical objects within a reasonable amount of time, and also with greater ease. Our system uses novel view- and path-planning algorithms to control a structured-light scanner mounted on a calibrated motorized positioning system. We demonstrate the ability of our prototype to safely, robustly, and automatically acquire 3D models for large collections of small objects, such as toy soldiers and fragments of ancient artifacts.
Links
Citation
Xinyi Fan, Linguang Zhang, Benedict Brown, and Szymon Rusinkiewicz.
"Automated View and Path Planning for Scalable Multi-Object 3D Scanning."
ACM Transactions on Graphics (Proc. SIGGRAPH Asia) 35(6), November 2016.
BibTeX
@article{Fan:2016:AVA,
author = "Xinyi Fan and Linguang Zhang and Benedict Brown and Szymon Rusinkiewicz",
title = "Automated View and Path Planning for Scalable Multi-Object {3D} Scanning",
journal = "ACM Transactions on Graphics (Proc. SIGGRAPH Asia)",
year = "2016",
month = nov,
volume = "35",
number = "6"
}