Merge2-3D: Combining Multiple Normal Maps with 3D Surfaces
IEEE International Conference on 3D Vision (3DV), December 2014
Abstract
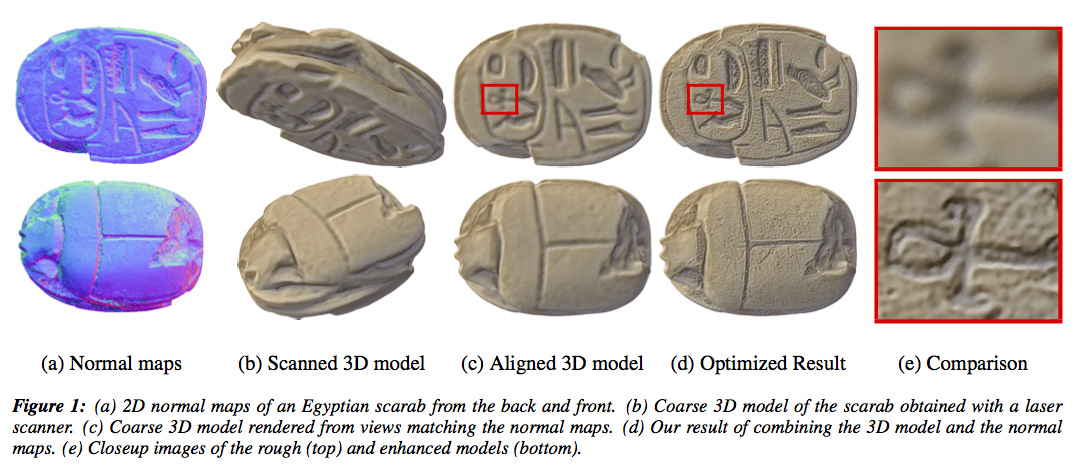
We propose an approach to enhance rough 3D geometry with fine details obtained from multiple normal maps. We begin with unaligned 2D normal maps and rough geome- try, and automatically optimize the alignments through 2-step iterative registration algorithm. We then map the normals onto the surface, correcting and seamlessly blending them together. Finally, we optimize the geometry to produce high-quality 3D models that incorporate the high-frequency details from the normal maps. We demonstrate that our algorithm improves upon the results produced by some well-known algorithms: Poisson surface reconstruction [1] and the algorithm proposed by Nehab et al. [2].
Paper
- PDF (3.7 MB)
Supplemental Material
- PDF (210 MB)
Citation
Sema Berkiten, Xinyi Fan, and Szymon Rusinkiewicz.
"Merge2-3D: Combining Multiple Normal Maps with 3D Surfaces."
IEEE International Conference on 3D Vision (3DV), pp. 440-447, December 2014.
BibTeX
@article{Berkiten:2014:MCM,
author = "Sema Berkiten and Xinyi Fan and Szymon Rusinkiewicz",
title = "{Merge2-3D}: Combining Multiple Normal Maps with {3D} Surfaces",
journal = "IEEE International Conference on 3D Vision (3DV)",
year = "2014",
month = dec,
pages = "440--447"
}